Tech-Highlight: Abner Barros
July 24, 2019 | Categories: Blog
Computational Bayesian methods for localizing and tracking underwater objects using active sonar and small sensor arrays
Towards MIKEL’s goals of providing innovative technology to the U.S. Navy, we highlight some technical research that is on-going by one of our young professionals, Abner Barros. Abner is currently a Ph.D. candidate at the University of Massachusetts at Dartmouth focusing on active sonar contact localization and tracking.
Specifically, Abner is researching computational Bayesian methods for localizing and tracking underwater objects using active sonar and small sensor arrays. Sensor arrays are a collection of similar sensors. In Abner’s case the sensor array is comprised of underwater microphones called hydrophones that listen in all directions. Individually these hydrophones do not allow directional localization but when processed jointly in an array they can be used to sense the direction of arriving acoustic energy. Typically small sensors do not allow accurate localization and tracking of objects (a result from array processing theory). However, over the last two decades advances have been made to improve the capability of small arrays. Abner’s work advances the state-of-the-art in array signal processing of active sonar using sophisticated statistical techniques known as Gibbs Sampling. Below you will find a description of his work. Go Abner!
 |
| Abner Barros, Electrical Engineer, MIKEL Inc., Electrical Engineering Ph.D. Candidate at University of Massachusetts, Dartmouth. |
In underwater surveillance applications, active sonar systems are employed to detect, localize, and track quiet and slowly-moving acoustic contacts. The advent of sophisticated stealth submarine technology post-Cold War led the U.S. Navy to shift its strategic focus from deep-water to littoral or coastal water. This change of course steered underwater acoustic research emphasis to address the challenges of shallow-water environments, which are primarily associated with the complex nature of ocean sound propagation. These challenges limit the accuracy and effectiveness of active sonar systems. To overcome these limitations requires the development of advanced sonar signal processing algorithms that model and capture the essential attributes of shallow water acoustic propagation. This is an active area of research and is the focal point of my graduate studies at the University of Massachusetts Dartmouth. MIKEL, Inc. has and continues to support this research effort, which is currently being performed under the guidance of Electrical and Computer Engineering (ECE) Associate Professor Paul J. Gendron.
 |
|
Figure 1. Acoustic field overview |
The particular problem of interest involves using a bistatic active sonar arrangement, illustrated in the Figure above, to localize a submerged mobile object in a monitored underwater region. In shallow-water environments, sound propagation is dominated by multiple propagation paths that hinder the performance of these systems. This problem is further compounded by the refractive features of the medium. Thus, to model these realistic conditions, sonar processing schemes must take into account both refracted (or bent) ray paths and path-dependent Doppler shift that arise due to the relative motion between the object and the sonar receiver. In particular, multipath arrivals with closely-spaced angle of arrival and Doppler components, backscattered by a distant object, are exceedingly difficult to resolve. To address these challenges, we have developed a high-resolution computational Bayesian algorithm based on the Markov Chain Monte Carlo Gibbs sampling approach. This method is capable of resolving closely-spaced arrivals from observations made with a vertical linear array of limited aperture operating in coherence-limited underwater environments. Constraints on aperture are often driven by cost considerations and the limited size of underwater sensor platforms. To localize the object, the resulting angle of arrival and Doppler frequency joint posterior probability density function (PDF) is inverted to the object’s range, depth, and speed joint PDF shown in the Figure below.
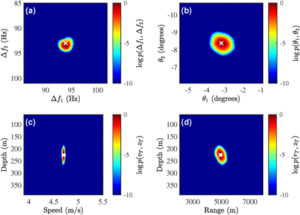
Figure 2. Example of posterior PDFs for two multipath arrivals. Ground truth is denoted by (X) symbol. |
This active sonar algorithm is envisioned to be an enabling processing scheme in a bottom-mounted surveillance system. The envisioned system may be operated in either real-time or deployed with a retrievable data storage device to gather intelligence that can be recovered and later analyzed. For real-time operation, processed data can be relayed to a command-and-control center, providing real-time situational awareness of the monitored region. In both cases, the proposed algorithm can provide information that can reveal emerging patterns such as traffic in the region, and customary depth and speed through the water of objects of interest. Lastly, the numerical Bayesian algorithm developed can be employed recursively with successive PDFs serving as inputs to a Kalman-like algorithm for higher-level tracking applications. Research results from this study were presented at the Acoustical Society of America (ASA) conferences (invited talks) and at the IEEE Underwater Acoustic Signal Processing (UASP) workshop.